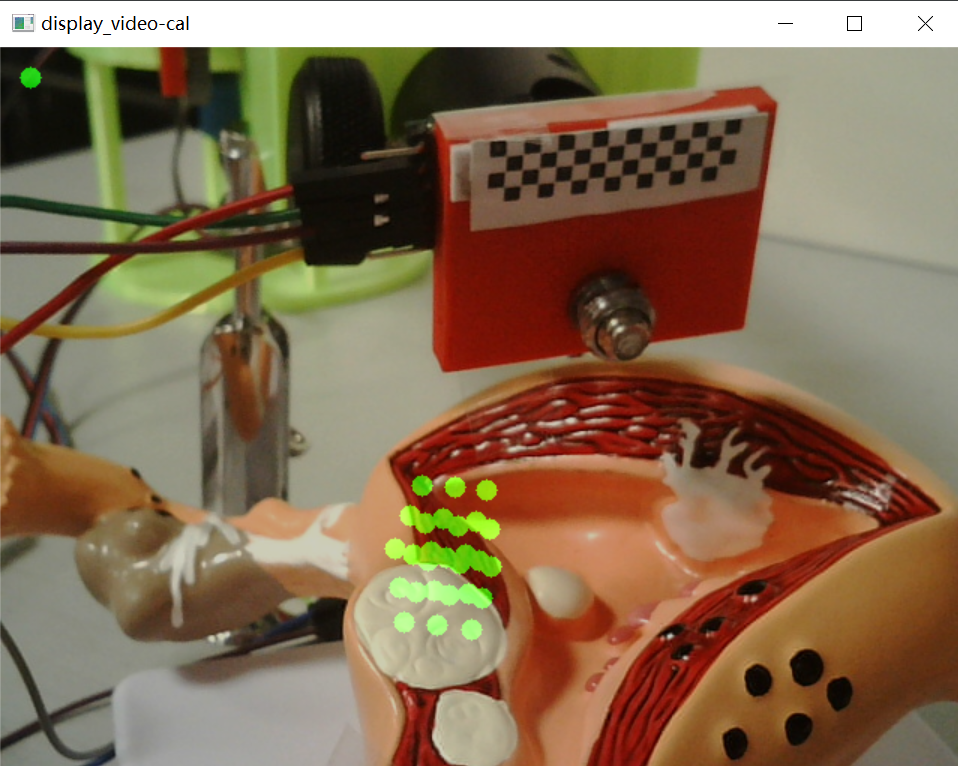
This project aims at using AR technology to project detected myoma on the monitor screen to help surgeons operate more accurately during laparoscopic surgery.
My work in this project mainly focus on locating and calibrating the Laparoscopic Camera by detecting a chessboard marker using OpenCV, as well as implementing algorithms to locate the endpoint of a robotic arm.
I also tested the prototype on the communicated with surgeons about their needs about Myomectomy Surgery and feedback about using the tool.